Laplace Redux -- Effortless Bayesian Deep Learning
NIPS 2021,拉普拉斯近似(Laplacian Approximation)。
Overview
- paper: https://proceedings.neurips.cc//paper/2021/file/a7c9585703d275249f30a088cebba0ad-Paper.pdf
- library: https://github.com/AlexImmer/Laplace
- experiment: https://github.com/runame/laplace-redux
Background
现代神经网络有几个缺点
- 校准能力差,过度自信(overconfidence)。
- 持续训练时对先前任务的灾难性遗忘(catastrophic forgetting)。
- 选择合适的网络架构和超参数很困难。
贝叶斯模型为解决这些问题,采取了如下措施:
- 给模型配备鲁棒的不确定估计。
- 捕获过去的信息,使得模型能够持续学习。
- 通过在数据拟合和模型复杂度间寻找最优的trade-off,实现自动的模型选择。
贝叶斯神经网络介绍:https://zhuanlan.zhihu.com/p/81170602
但是贝叶斯神经网络并没有投入实施,主要是因为其难以实现和调参,训练代价大,很难scale到现代的模型和数据集。
本文认为,拉普拉斯近似(Laplace Approximation,LA)是贝叶斯深度学习中一种简单高效,同时有竞争力的近似方法。
- 本文率先调研了深度学习中LA的发展,并展现了可扩展且实用的LA的关键要素。
- 提供了基于Pytorch的LA库laplace,实现了大量LA变种。
- 使用laplace库进行了大量实验,展现了LA的竞争力。
Method
Laplace Approximation in Deep Learning
深度学习中,LA有两种方式使用:
- 采用LA近似模型的后验分布,使得模型能够概率预测。
- 使用LA近似model evidence,从而可以模型选择(调超参数)。
给定数据集\(\mathcal{D} := \{ (x_n \in \mathbb{R}^M, y_n \in \mathbb{R}^C)\}\),参数为\(\theta\in\mathbb{R}^D\),\(L\)层的神经网络\(f_\theta:\mathbb{R}^M\rightarrow \mathbb{R}^C\)旨在最小化经验风险,通常可以分解为经验损失项\(\ell(x_n,y_n;\theta)\)和正则项\(r(\theta)\)的和。 \[ \theta_{MAP} = \arg\min_{\theta\in\mathbb{R}^D}\mathcal{L}(D;\theta) = \arg\min_{\theta\in\mathbb{R}^D}\left(r(\theta) + \sum_{n=1}^N\ell(x_n,y_n;\theta)\right) \] 从贝叶斯的角度来看,这些项可以看作独立同分布的对数似然(log-likelihood)和对数先验(log-prior),此时\(\theta_{MAP}\)事实上就是最大后验估计(Maximum A Posteriori, MAP)。 \[ \ell(x_n,y_n;\theta) = -\log p(y_n|f_\theta(x_n))\qquad \text{and} \qquad r(\theta) = -\log p(\theta) \] 广泛使用的正则方法\(r(\theta)= \frac{1}{2} \gamma^{-2}\|\theta\|^2\)(也被称为权重衰减),对应一个中心的高斯先验\(p(\theta)=\mathcal{N}(\theta;0,\gamma^2 I)\)。训练损失取负后的指数\(\exp(-\mathcal{L}(\mathcal{D};\theta))\)就相当于未归一化的后验,归一化后可得 \[ \begin{equation} p(\theta \mid \mathcal{D}) = \tfrac{1}{Z} \,p(\mathcal{D} \mid \theta) \, p(\theta) = \tfrac{1}{Z}\exp(-\mathcal{L}(\mathcal{D};\theta)), \qquad Z:= \textstyle\int p(\mathcal{D} \mid \theta) \, p(\theta) \,d\theta \end{equation} \] 拉普拉斯近似用一个\(\mathcal{L}\)的二阶展开去构造对\(p(\theta|\mathcal{D})\)的高斯近似,因此考虑 \[ \begin{equation} \mathcal{L}(\mathcal{D}; \theta) \approx \mathcal{L}(\mathcal{D}; \theta_\text{MAP}) + \tfrac{1}{2} (\theta - \theta_\text{MAP})^\intercal \left( \nabla^2 _\theta \mathcal{L}(\mathcal{D}; \theta) \vert_{\theta_\text{MAP}} \right)(\theta - \theta_\text{MAP}) , \end{equation} \] 其中一阶项在\(\theta_{\text{MAP}}\)处消失,从而可以将其看作高斯分布,即拉普拉斯后验近似: \[ \begin{equation} p(\theta \mid \mathcal{D}) \approx \mathcal{N}(\theta; \theta_\text{MAP}, \varSigma) \qquad\text{with}\qquad \varSigma := -\left( \nabla^2_\theta \mathcal{L}(\mathcal{D};\theta) \vert_{\theta_\text{MAP}} \right)^{-1}. \end{equation} \] 归一化常数\(Z\)(通常被称为marginal likelihood或evidence)可用于模型选择,可以通过下式近似: \[ Z \approx \exp(-\mathcal{L}(\mathcal{D};\theta_\text{MAP})) \, (2\pi)^{D/2} \, (\det \varSigma)^{1/2} \] \(\theta_{\text{MAP}}\)可以通过标准的深度学习得到,唯一的额外步骤就是计算Hessian矩阵在\(\theta_{\text{MAP}}\)处的逆。因此在得到预训练模型后,可以离线计算LA。
一般来说,具有两次微分后对数密度的先验都可以使用。由于权重衰减的广泛使用,本文假设先验是零均值的高斯分布\(p(\theta)=\mathcal{N}(\theta;0,\gamma^2 I)\)。从而Hessian矩阵取决于对数先验的正则器,以及复杂的对数似然。 \[ \begin{equation} \nabla^2_\theta \mathcal{L}(\mathcal{D};\theta) \vert_{\theta_\text{MAP}} = -\gamma^{-2} I - \textstyle\sum_{n=1}^N \nabla^2_\theta \log p(y_n \mid f_\theta(x_n)) \vert_{\theta_\text{MAP}}. \end{equation} \] Hessian矩阵之所以没有简单实现,就是因为式中第二项随着网络参数的规模平方增长。
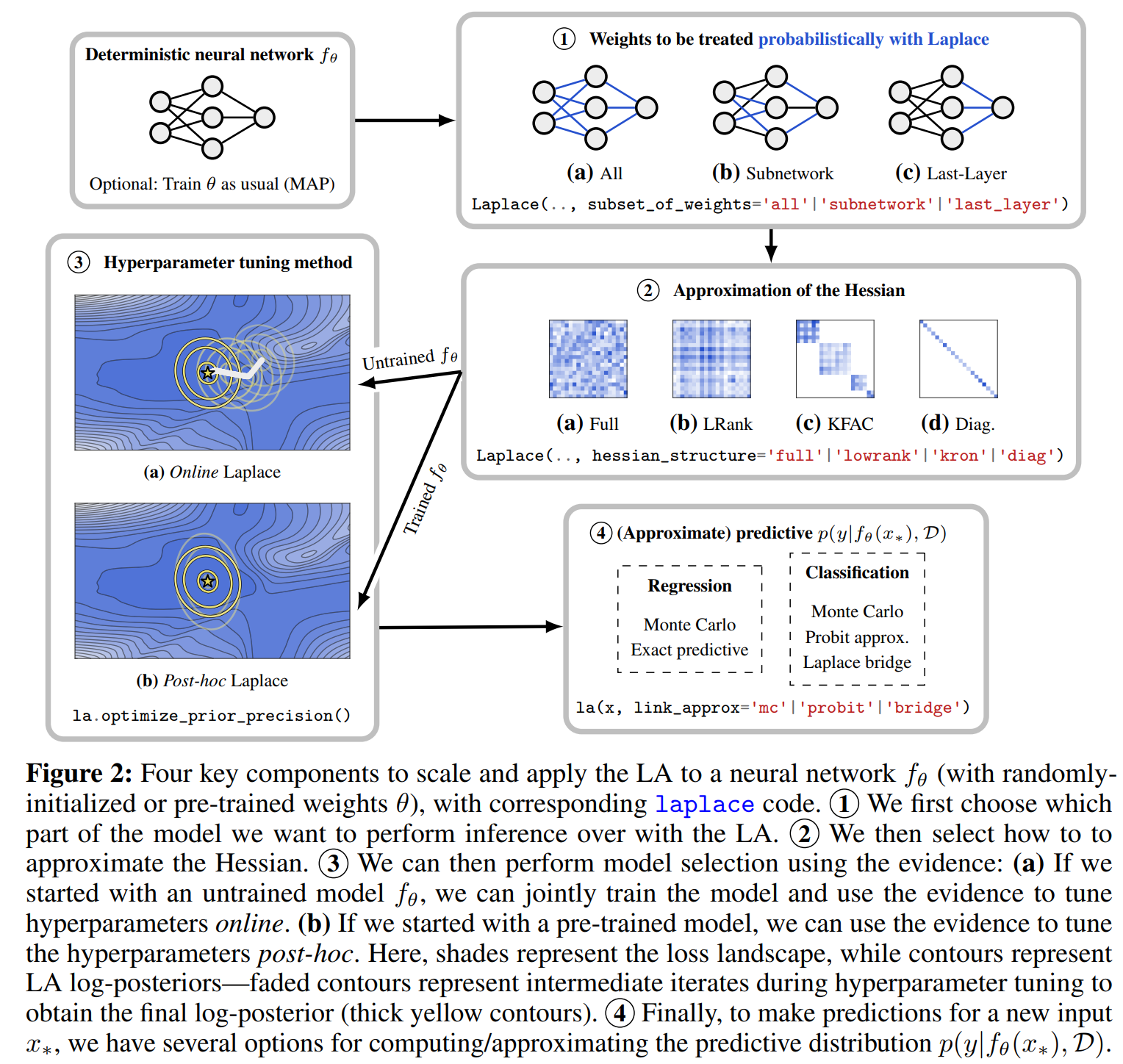
Four Components of Scalable Laplace Approximation
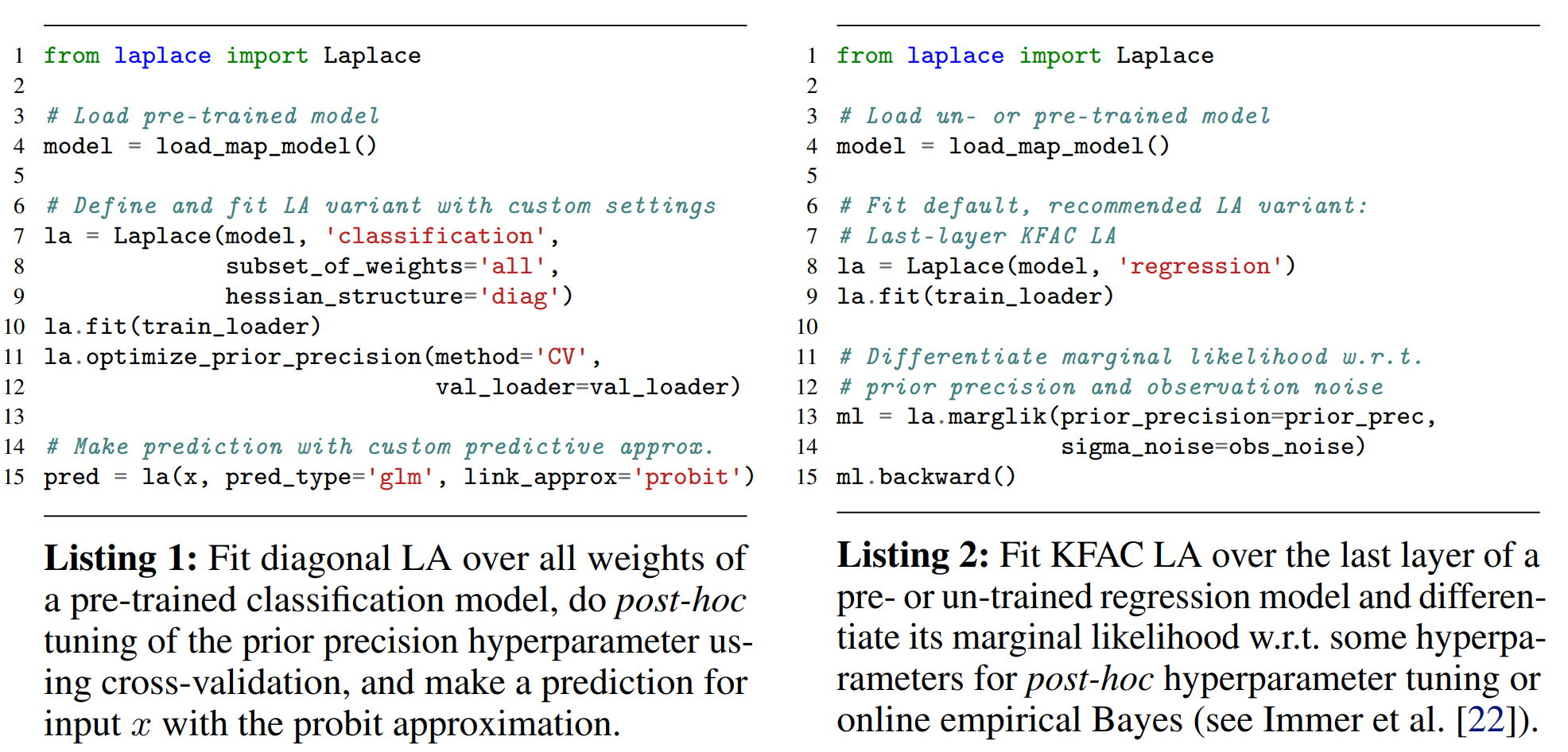
laplace: A Toolkit for Deep Laplace Approximation
Experiments
本文的实验分为四个部分
- 寻找LA的最佳设计选择。
- 在in-distribution、dataset-shift和out-of-distribution三种设置下,验证LA相比于贝叶斯baseline的竞争力。
- 展现LA适用于各种数据模态和网络架构(包括transformer),这种情况下贝叶斯方法难以使用。
- 展示LA可以作为持续学习的一个易用baseline。
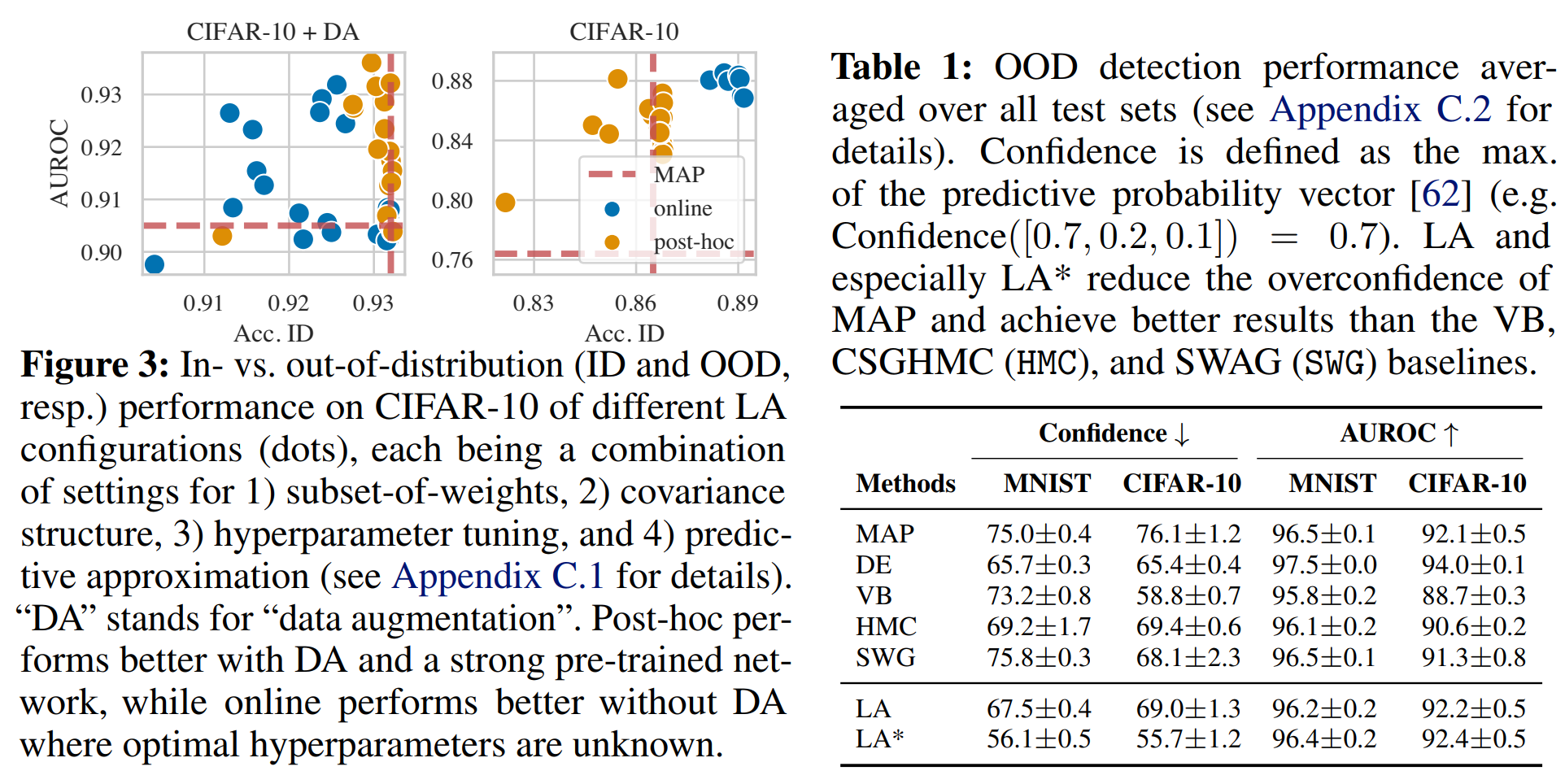
实验结果表明,在CIFAR-10有数据增强的情况下,后处理的LA表现更好。
laplace中默认设置是一个后处理KFAC最后一层的LA,采用GGN近似Hessian矩阵。这适用于所有最后一层为全连接层的网络架构,因此适用于预训练网络。对于需要自己训练的模型,采用GGN或经验Fisher的在线KFAC LA是一个不错的baseline。